Mobile robotics gets increasingly important for every day use. Especially domestic cleaning applications are at hand today and tend to become a mass market. Unfortunately, there are very high demands concerning robust and low cost implementation. Hence methods known from industrial cleaning robots are not applicable. Instead new low cost methods have to be developed which are robust and work especially without an expensive sensory system. We thus decided to build our own cleaning robots not only to address the upcoming questions in real-world set-ups. Building these robots was done together with a team of students in order to make them familiar with the design of interdisciplinary and mechatronic systems.
|
The floor cleaning robot HECTOR is a robot specifically designed and optimised for the 1st International Cleaning Robot Contest carried out at the IEEE/RSJ International Conference on Intelligent Robots and Systems - IROS 2002 (30.9. - 4.10.2002, Lausanne, Switzerland) where HECTOR reached the fourth place. Its top design goals were to be implemented by a small team of students in a short time and, of course, to show competitive cleaning results for any kind of (dry) dirt as well. HECTOR hence should clean faster (and hopefully better) than a good housewife or houseman. It hence has a maximum speed of 0.8 m/s. But normally it is operated at a lower speed.
|
 HECTOR cleaning at the 1st International Cleaning Robot Contest
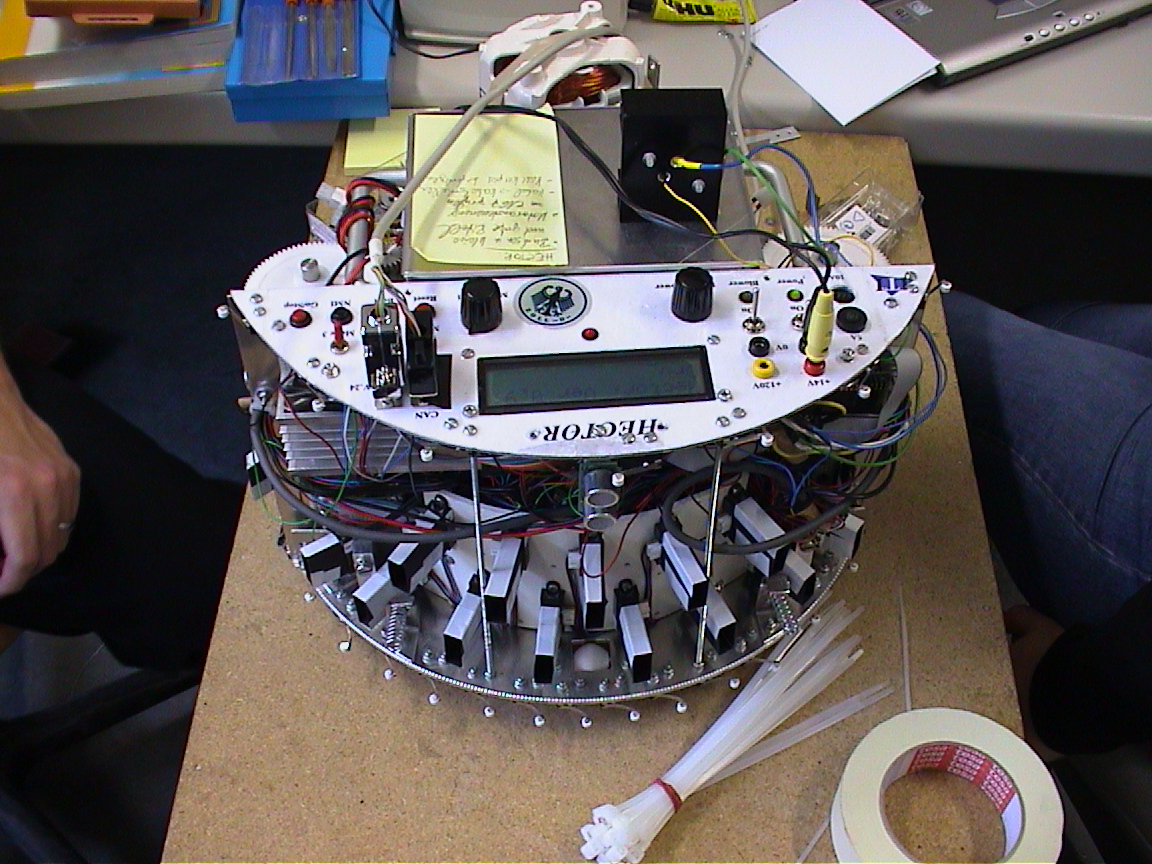
HECTOR in our lab a day before going to the Cleaning Robot Contest
|
A 2-wheeled differential drive system is used in order to achieve a high manoeuvrability. This is important in case of the machine facing corners and obstacles. In order to clean a large area with lots of obstacles in a short time, HECTOR is also designed for high agility. Hence its drive system is such that the machine only needs a fairly short distance of about 10 cm to reach its maximum speed. But the breaking distance is more important. Due to the use of a worm gear, a breaking distance of only less than 3 cm is obtained, despite of the weight of the robot.
HECTOR at the competition run
| platform: | aluminum plate (diameter 40 cm) cleaning slot 38.5 cm width up to 120 V fan supply (accumulator) |
| size: | 40 × 40 × 24 cm |
| weight: | 17 kg |
| speed: | up to 0.8 m/s |
| sensors: | 17 infrared distance sensors |
| actuators: | differential drive system with worm gears 1000 W vacuum cleaner fan (Miele) |
| hardware: | Infineon C167-mcirocontroller |
|
The window cleaning robot WICTOR was specifically designed for the 1st Cleaning Robot Contest carried out at the IEEE/RSJ International Conference on Intelligent Robots and Systems - IROS 2002 (30.9. - 4.10.2002, Lausanne, Switzerland). It also had to be implemented by a small team of students in a short time. The top design goals thus were simplicity and a robust operation. I.e., WICTOR should never fall from a window. Hence it uses no suction principle, but a tethered mode of locomotion. Another goal was its capability to clean large windows with a size of many square meters without needing any maintenance. Because time needed for designing and building the robot was a very critical issue, WICTOR´s construction is very simple. Additionally no position estimation is used (also in order to minimize costs). At present WICTOR is nothing but a functional prototype. Nevertheless, locomotion and cleaning principle were granted a patent meanwhile. And WICTOR was the lucky winner of window cleaning contest.
|
 WICTOR on the 1st International Cleaning Robot Contest
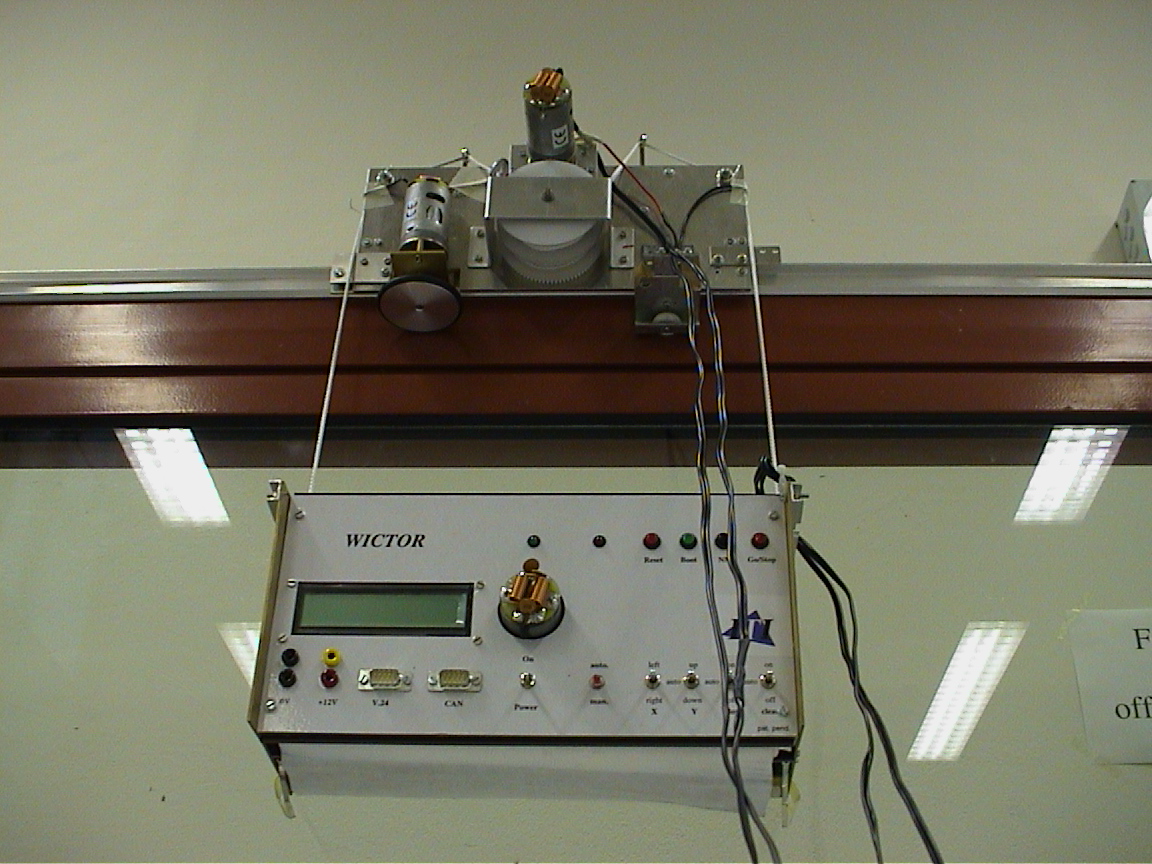
WICTOR at a window in our lab
|
Wet tissue (Sidolin from Henkel) is used for cleaning. A good coverage and performance are achieved by using the whole upper and lower edge of the cleaning unit for active cleaning. Using the body of the cleaning unit as a suction cup and evacuating it by a fan gives the needed contact pressure for the cleaning tissue. In order to be able to clean a large area, the cleaning tissue is moved along both cleaning edges, either in a steady slow movement or in intervals. Because standard wet cleaning tissue was too small for our purpose, the Henkel company was so kind to sponsor us by non-standard sized material.
Only a START-button has to be pressed to start the system. Then it operates autonomously by using the bump signals to initiate state transitions in a simple state machine, i.e. to change into another movement phase. Because there are no obstacles on a window, the navigation strategy is very simple. After reaching its initial position (the lower right corner), the cleaning unit is raised until it reaches the top of the window. Then it is moved sideward for a certain amount of time, before it is let down until it reaches the bottom of the window. It is raised again and so forth. This cycle is repeated until a horizontal movement is contacting the window frame sidewise. Then a final cleaning movement is performed. WICTOR hence follows simply a meander to cover the whole window area. When finished, the robot is stopped in an upper position in order to make it easy to remove and to transport. Hence except pressing the start button, no further intervention is required.
WICTOR at the competition run
| platform: | traveling trolley with 2 gear drives for moving the cleaning unit cleaning unit with fan for adhesion and two cleaning clothes moving along at bottom and upper edge 30 cm cleaning width |
| size: | 30 × 20 × 15 cm traveling trolley 33 × 16.5 × 12 cm cleaning unit |
| weight: | 1.2 kg traveling trolley 1.8 kg cleaning unit |
| speed: | up to 0,3 m/s (vertical) up to 0,1 m/s (horizontal) |
| sensors: | 8 bump switches |
| actuators: | 2 gear drives for horizontal and vertical movement 1 fan at cleaning unit |
| hardware: | Infineon C167-mcirocontroller |
Climbing is a challenge because of fighting gravity. Although our robots are constructed mainly for educational scenarios, our aim is to build and explore low cost and low weight climbing systems in order to investigate their suitability for (domestic) real world applications. For instance, the climbing robots DEXTER and CLAUS exploit cheap passive suction cups to adhere to the wall in order to avoid a vacuum pump. This principle is now registered as a utility patent.
|
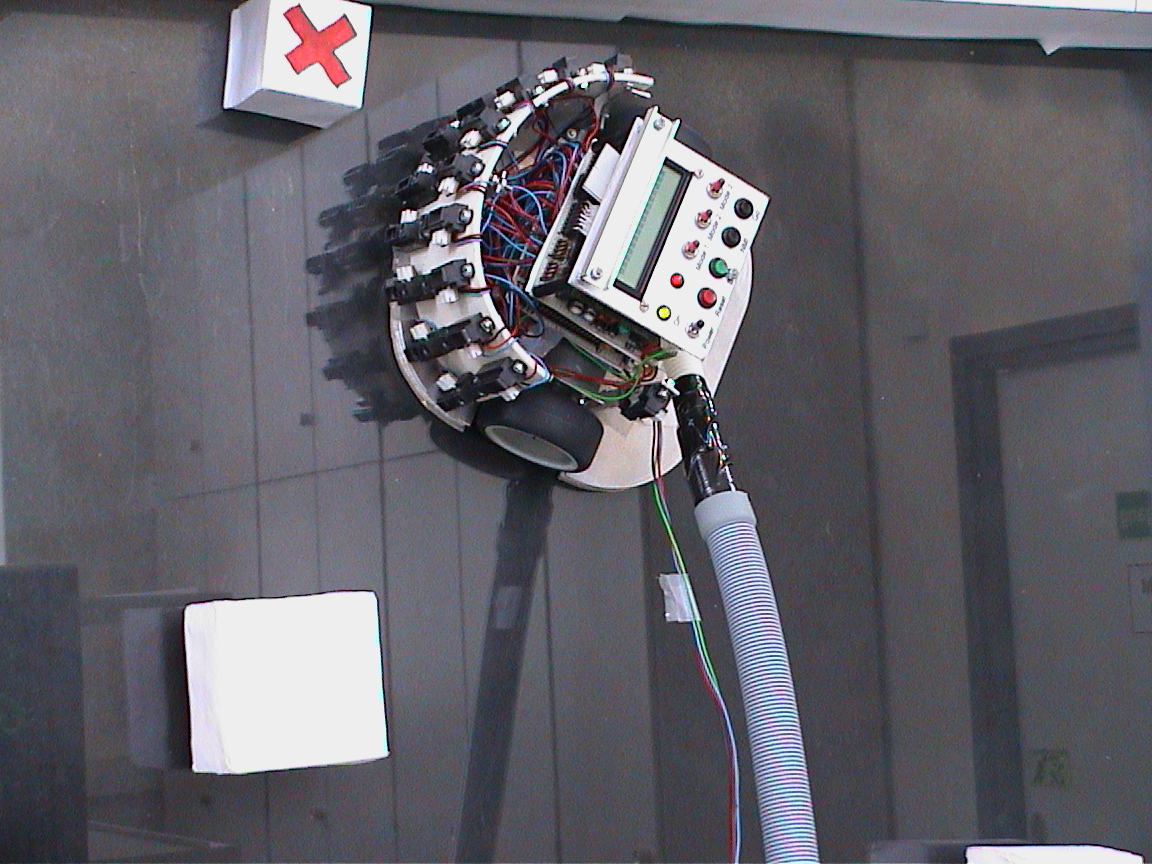
FALCO employs the inverse hovercraft principle to adhere the wall and is propelled by a two-wheeled differential drive. It was built within a student´s project for the CLAWAR Climbing Robot Student Competition at the 4th International Conference on Climbing and Walking Robots - CLAWAR2001. Here it achieved the highest autonomy and climbing speed of all competitors. At the Climbing Contest of the 1st CLAWAR/EURON Workshop on Robots in Entertainment, Leisure, and Hobby, Vienna, Austria, Dec. 2004, it made the 2nd place and the 3rd place at the CLAWAR Climbing Robot Student Competition which took place at 7th International Conference on Climbing and Walking Robots - CLAWAR2004, Madrid, Spain, Sept. 2004. |
|
FALCO at the competition run
| platform: | aluminum plate (size 20 × 20 cm) prepared as a large suction cup suction driven by an ordinary vacuum cleaner propulsion by two electrically driven wheels |
| size: | 20 × 20 × 18 cm |
| weight: | 1.6 kg |
| sensors: | 20 infrared distance sensors 1 inclination sensor |
| actuators: | differential drive system |
| hardware: | Infineon C167-mcirocontroller |
|
ALFRED is a member of the FRED-family of walking robots (see also FRED II and Flat Freddy). It was built within a student´s project for the CLAWAR Climbing Robot Student Competition at the 4th International Conference on Climbing and Walking Robots - CLAWAR2001. It made 1st place at the Climbing Contest which took place at the 1st CLAWAR/EURON Workshop on Robots in Entertainment, Leisure, and Hobby, Vienna, Austria, Dec. 2004. |

|
ALFRED climbing up a door
| platform: | aluminum plate (size 25 * 10 cm) propulsion by two pneumatically driven sliding frames ordinary suction cups at each frame |
| size: | 25 × 25 × 18 cm |
| weight: | 3.1 kg |
| sensors: | two position sensors two pressure transducers |
| actuators: | pneumatic cylinders |
| hardware: | AVR ATmega16 microcontroller |
|
The climbing robot DEXTER is a climbing robot which adheres to the wall by passive suction cups. Hence only electric energy is needed. It has four degrees of freedom, allowing the transition from ground to wall, from wall to ceiling or to another wall. |

|
DEXTER climbing up a door
| platform: | 4 electric drives 3 passive suction cups at each foot |
| size: | 33 × 23 × 13 cm |
| weight: | 3.7 kg |
| sensors: | 3 ultrasonic and 2 infrared sensors at each foot 4 incremental encoders 2 inclination sensors |
| actuators: | 4 electric drives |
| hardware: | Infineon C167-microcontroller 2 PIC-microcontrollers |
The FRED-Family of Walking and Climbing Robots
Walking, running and climbing machines are a challenge for control system design and implementation because they require high autonomy on one the hand, but have hard real-time and cost requirements on the other hand. In order to tackle the whole system design process, we decided to build our own walking machines as practical testbeds and for student education.
Hence a family of walking machines named FRED (Flexibly Running Experimental Device) was designed. Its primary design goals were:
Walking, running and climbing machines are a challenge for control system design and implementation because they require high autonomy on one the hand, but have hard real-time and cost requirements on the other hand. In order to tackle the whole system design process, we decided to build our own walking machines as practical testbeds and for student education.
Hence a family of walking machines named FRED (Flexibly Running Experimental Device) was designed. Its primary design goals were:
- scaleable complexity of the control strategies, i.e. concerning the number of input variables as well as concerning the degree of accuracy, adaptivity, and autonomy
- robust construction using off-the-shelf components as far as possible due to cost-reasons
- high payload in order to be applicable to real-world problems
|
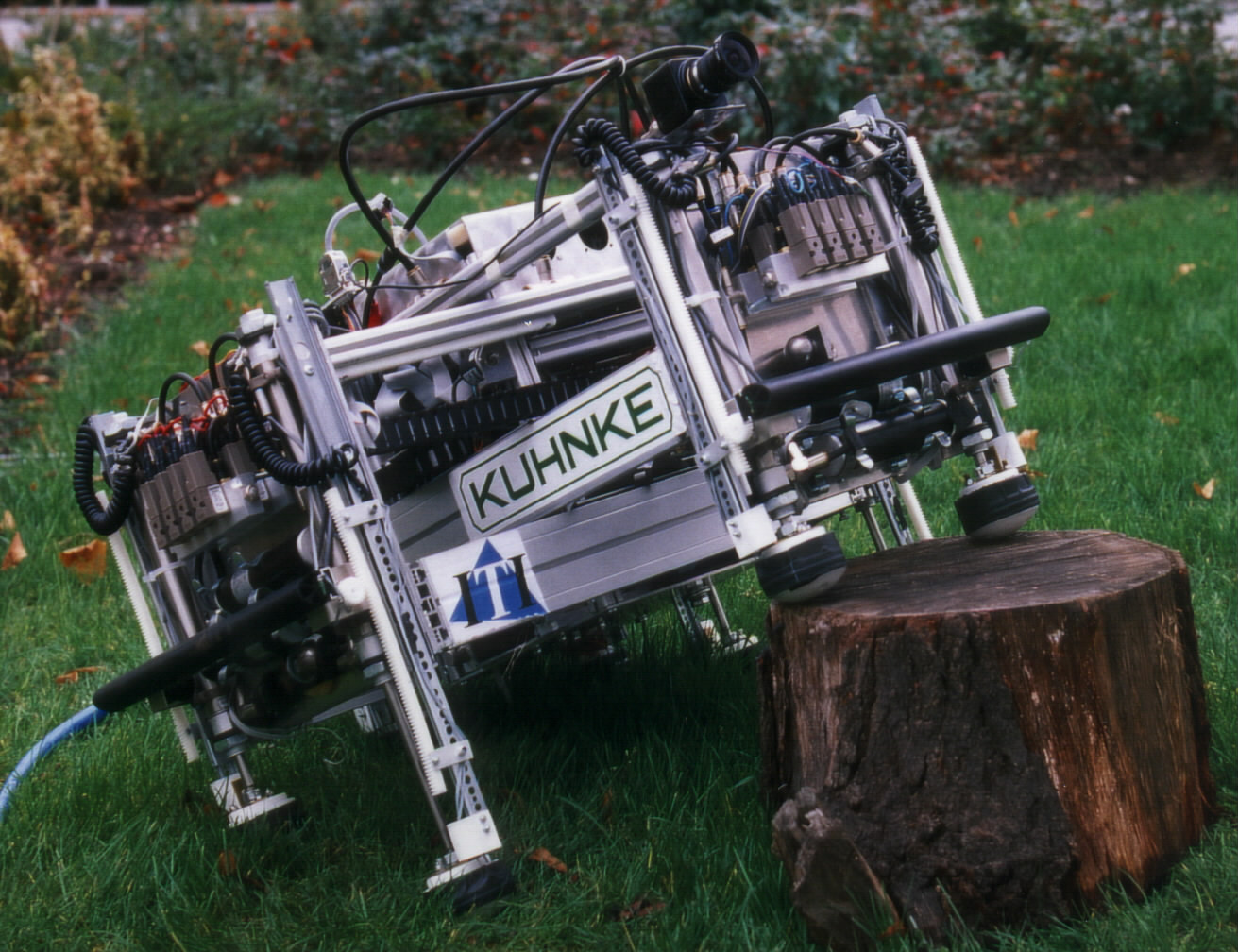
FRED II [1] is the first prototype of a family of pneumatically actuated walking machines for missions in a harsh outdoor environment. It is capable of crossing rough terrain with an unevenness of up to 20 cm without tilting. According to the FRED-family (Flexibly Running Experimental Device), it features a sliding frame construction and has 10 degrees of freedom which allow omni-directional movements. Due to its mechanical concept, a (static) stable gait is guaranteed for any phase of a walking move. It is hence an ideal platform to study different control system principles and implementations with different degrees of accuracy without sacrificing stability. |
|
FRED walking in natural terrain
| platform: | aluminum frame construction 10 active degrees of freedom |
| size: | 75 × 75 × 40 cm |
| weight: | 60 kg |
| payload: | 15 kg |
| sensors: | 21 pressure 10 position 8 ground contact 8 bumper |
| actuators: | 10 pneumatic cylinders |
| hardware: | 1 Pentium-PC onboard 1 stationary Pentium-PC Fast-Ethernet |
|
Flat Freddy [1] is a walking machine which was intended as a forerunner for a wall-climbing machine on one the hand. On the other hand it was built primarily as an example for interdisciplinary systems design in student education and features hence a rather simple, but very robust design. Flat Freddy belongs to walking machines with a fairly large payload. |

|
Flat Freddy in action
| platform: | steel case 12 active degrees of freedom |
| size: | 82 × 82 × 20 cm |
| weight: | 40 kg |
| payload: | 75 kg when moving, more than 200 kg for lifting |
| sensors: | 16 end position 12 bumper |
| actuators: | 12 pneumatic cylinders |
| hardware: | 1 mini-PC onboard |
[1]
Our special thank belongs to the Kuhnke GmbH, Malente, for sponsoring the pneumatic components.