|
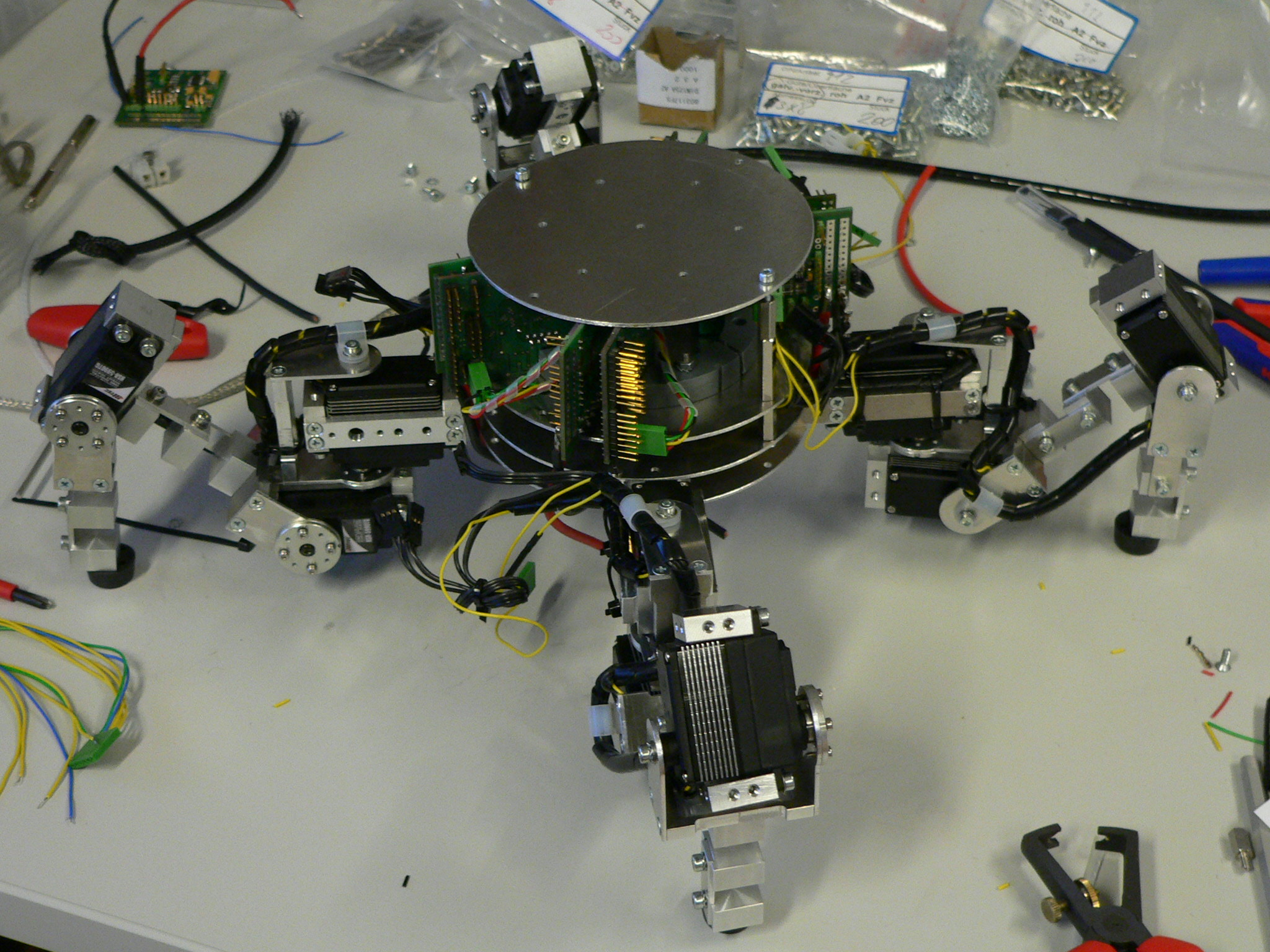
CLAUS is robot which may be operated as a walking and as a climbing robot which adheres to the wall by passive suction cups, just like our climbing robot DEXTER. It hence also needs no energy for adhesion. It has four legs, each with three degrees of freedom. |
|
CLAUS walking
CLAUS climbing vertically at a window
| platform: | body with 12 cm diameter and 7 cm height |
| size: | 44 × 44 × 16 cm |
| weight: | 5.1 kg |
| sensors: | 12 joint angle 12 motor current 8 force sensors at each leg |
| actuators: | 12 electric Hitec RC-servos HSR-5990TG) 4 passive suction cups, one at each foot |
| hardware: | 5 AVR AT90CAN128-microcontrollers + external PC |
|
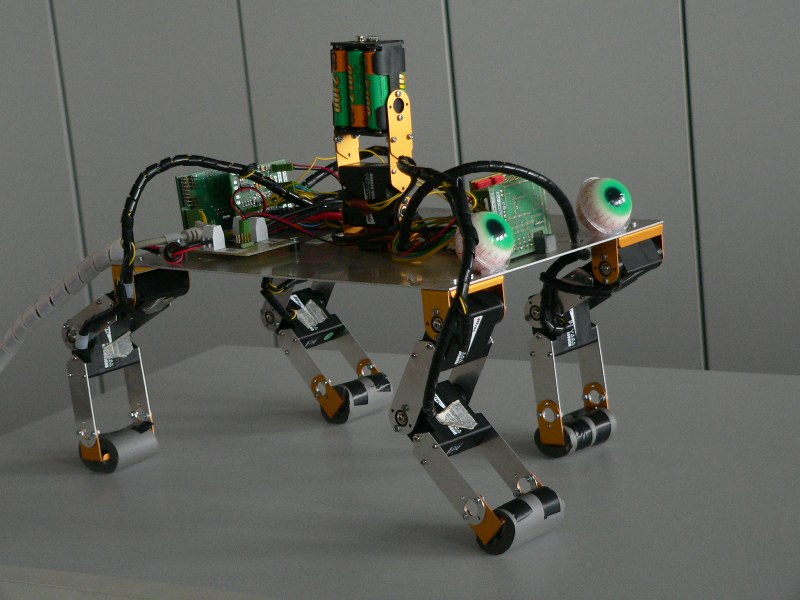
The robot WALTER (WALking TEst Robot) is a quadruped walking robot with simplicity and robustness as its ultimate design goals. It has two degrees of freedom for each leg and an additional servo for panning the batteries. To allow an active control of the center-of-gravity. |
|
WALTER walking on the floor and a step field
| platform: | aluminum plate 8 + 1 active degrees of freedom |
| size: | 29.6 × 21 cm (A4-letter) |
| weight: | 1.3 kg |
| sensors: | 8 joint angle 8 motor current |
| actuators: | 9 Hitec RC-servos HSR8498 |
| hardware: | 2 Atmel AT90CAN128 + external PC |
|
Walking and climbing robots quickly get too complicated due to their large number of degrees of freedom which makes the mechanical design as well as control complex and error-prone. On the other hand, wheeled mobile robots only have a limited need of coordination at lower control levels. Both limitations hamper basic investigations on emergent and self-organizing behaviour.
|
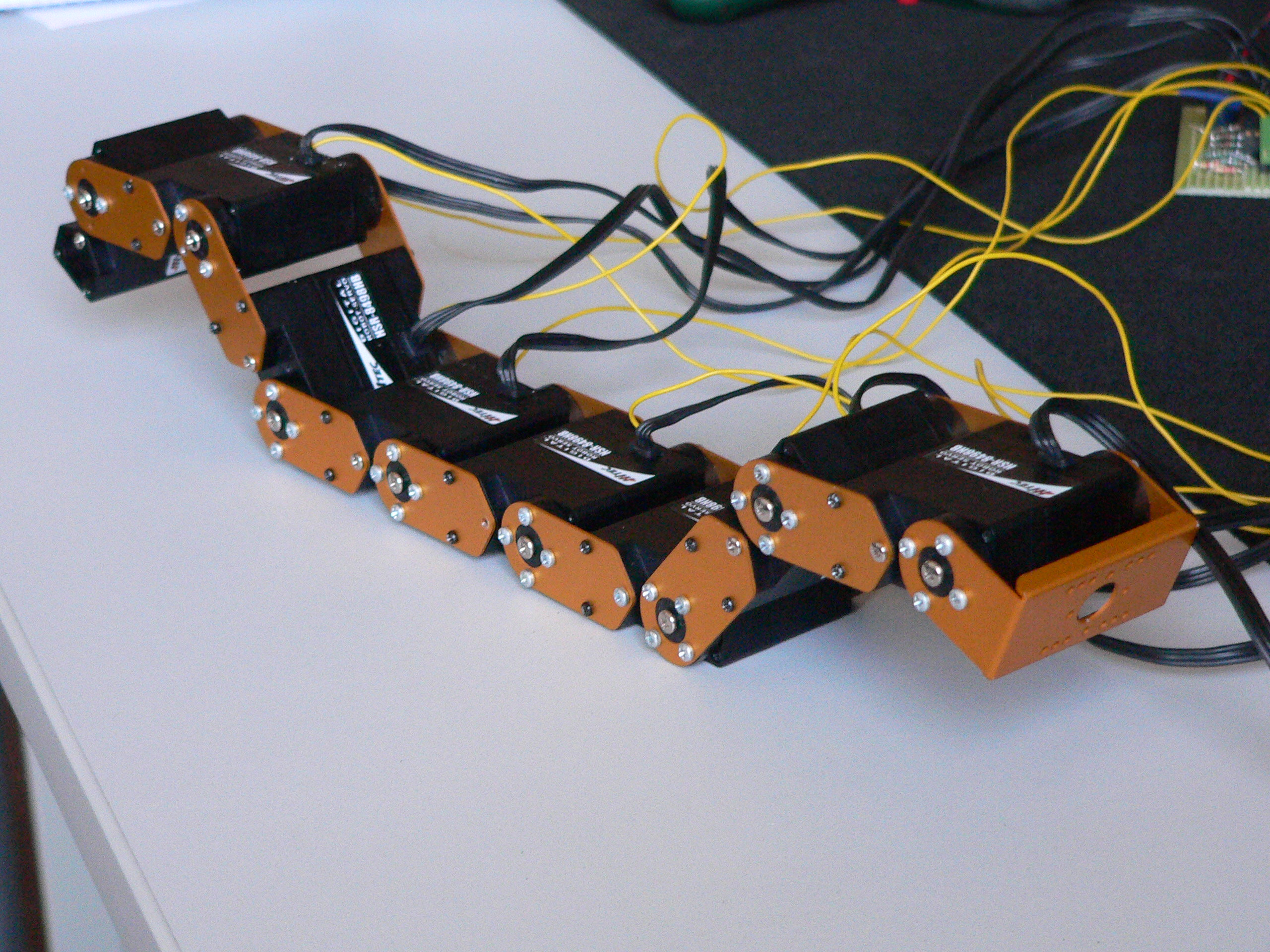 One-dimensional CARL (1D-CARL) with 8 Joints
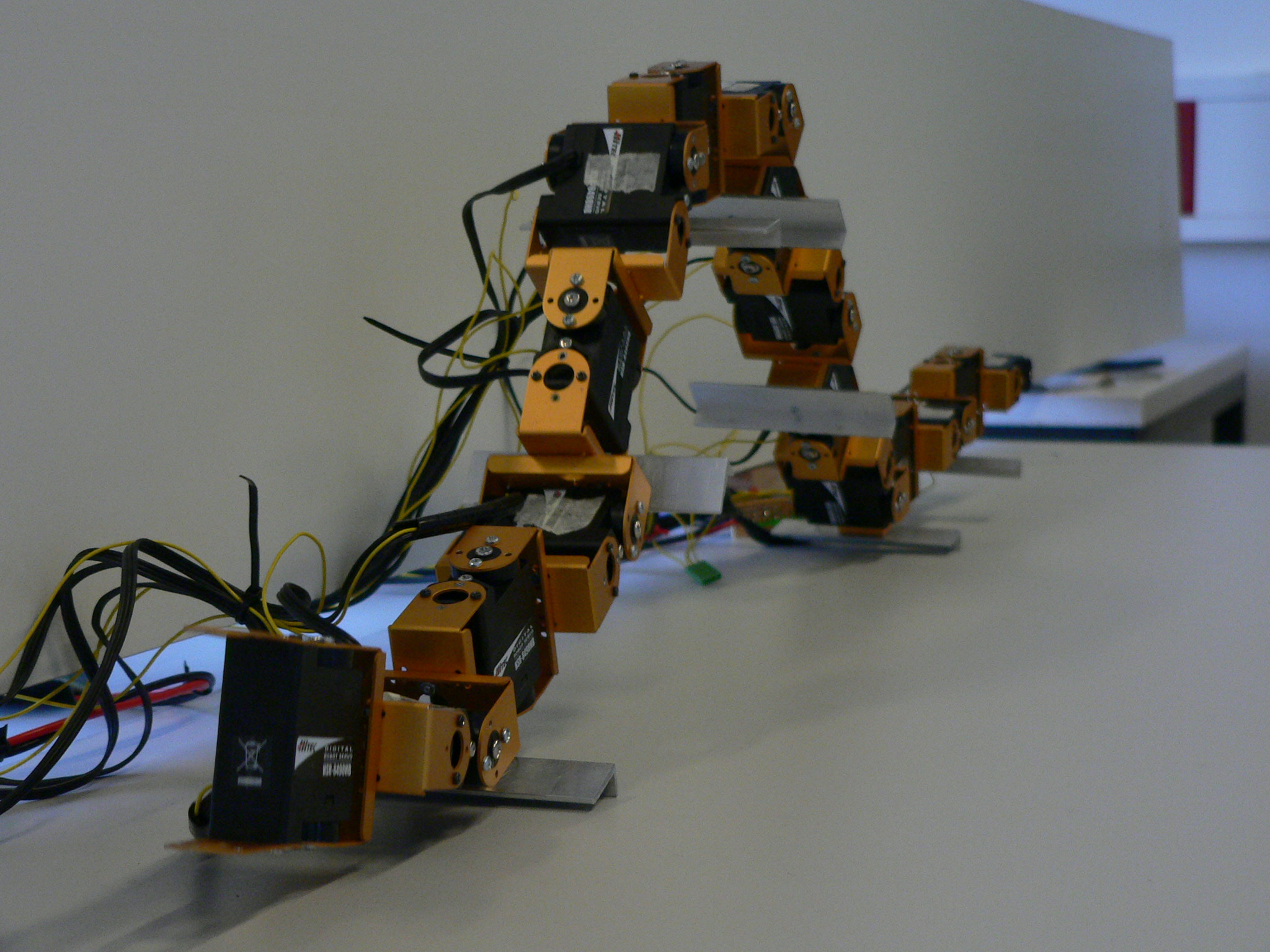
Two-dimensional CARL (2D-CARL) with 12 Joints
|
Two-dimensional CARL creeping sideways
| platform: | chain of RC-servos connected in series |
| size: | 60 × 5 × 4 cm (1D-CARL) 90 × 5 × 7 cm (2D-CARL) |
| weight: | 0.6 kg (1D-CARL) 0.9 kg (2D-CARL) |
| sensors: | 8 joint angle + 8 motor current (1 D-CARL) 12 joint angle + 12 motor current (1 D-CARL) |
| actuators: | 8 Hitec RC-servos HSR8498 (1 D-CARL) 12 Hitec RC-servos HSR8498 (2 D-CARL) |
| hardware: | 1 Atmel AT90CAN128 |
|
PACO (Pendulum-cart with Adaptive COntrol) is an omnidrive-platform capable of swinging-up and balancing a pendulum. The aim is to investigate self-optimization strategies under real-life conditions such as slippage, vibration and other disturbances which are introduced by steering and turning the platform along arbitrary trajectories. The rich set of sensors allows for detecting and fighting anomalies. This makes PACO well suited for investigations on trust management as well. PACO is thus an intuitive platform for investigations on self-optimization (SHARCS), on trust management (TIGERS) and on their combination. |

|
| platform: | aluminium chassis |
| size: | 32 × 32 × 37 cm |
| weight: | 3.1 kg |
| sensors: | 3 wheel encoders 3 motor currents 6 DoF-IMU at chassis 6 DoF-IMU at pendulum |
| actuators: | 3 gear drives with omni-wheels (40 mm) |
| hardware: | onboard FPGA + external PC (via USB) |
|
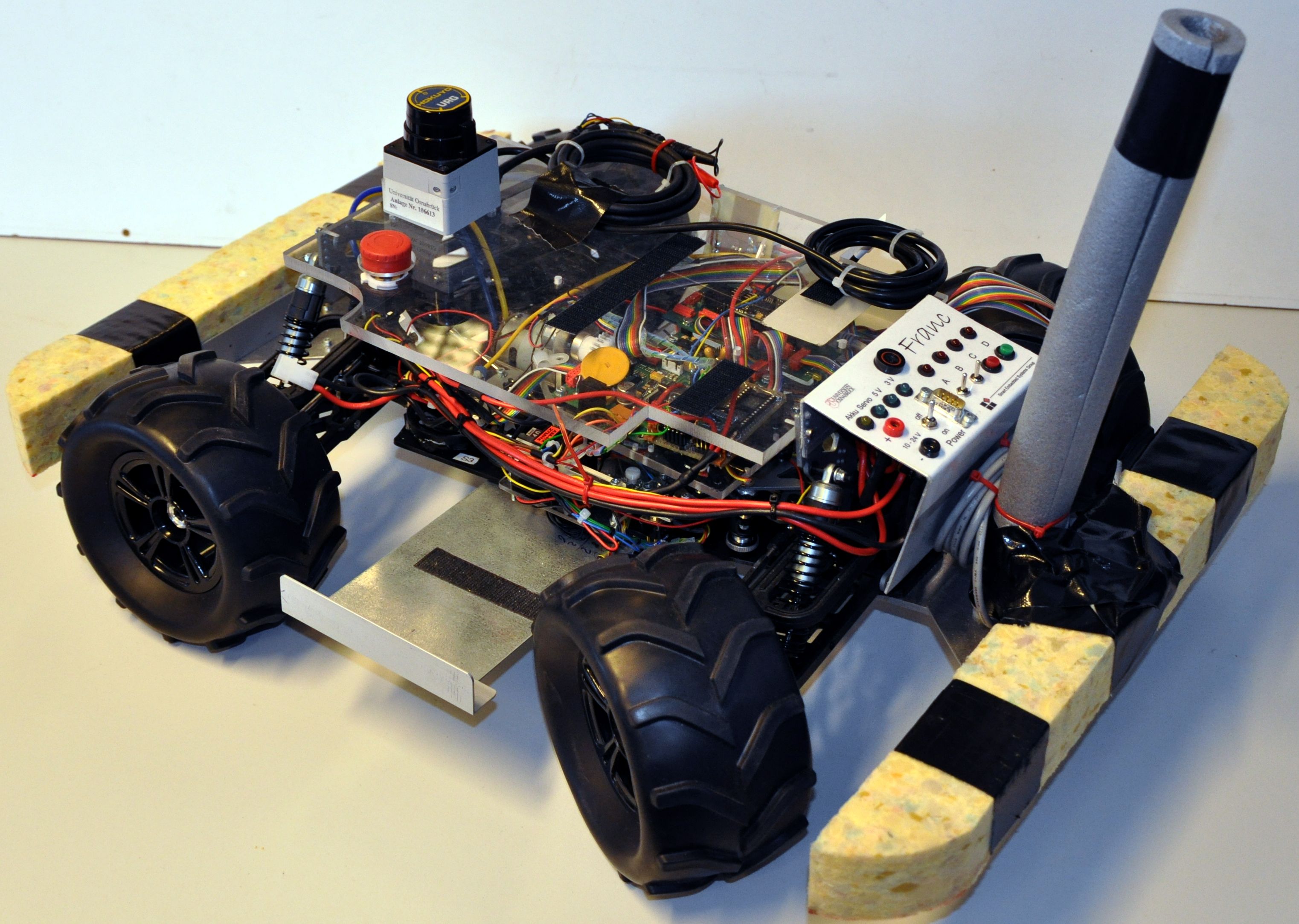
FRANC (Fast Running Adaptively Navigating Car) builds on a standard 4WD RC-chassis (1:8 scale). For investigations in our lab, it currently features an electric gear drive. Optionally it can be equipped with a combustion engine which allows for high speed (50 km/h) outdoor operation. Its main scope is to act as a workhorse for trust management investigations (TIGERS). FRANC thus allows capturing its movement by odometry, by IMU (3 DoF accelerator +3 DoF gyro) and by laser scanner. Additional sensors monitor the robot's health state (e.g. motor currents and temperature as well as accumulator state). |
|
| platform: | standard RC-car chassis |
| size: | 62.5 × 48 × 20 cm |
| weight: | 6.1 kg |
| sensors: | 1 drive encoder 1 motor current 6 DoF-IMU 1 Hokuyo laserscanner (optional) 5 temperature |
| actuators: | 4-wheel-drive with wheel diameter 150 mm and DC-Motor (560 class) standard RC-steering and brake-servos |
| hardware: | onboard FPGA + external PC (via USB) |