Jump to:
PASCAL, Pneumatic System, Pendulum Cart, Inverted Pendulum, Optical Pattern Recognition, TULPEN
|
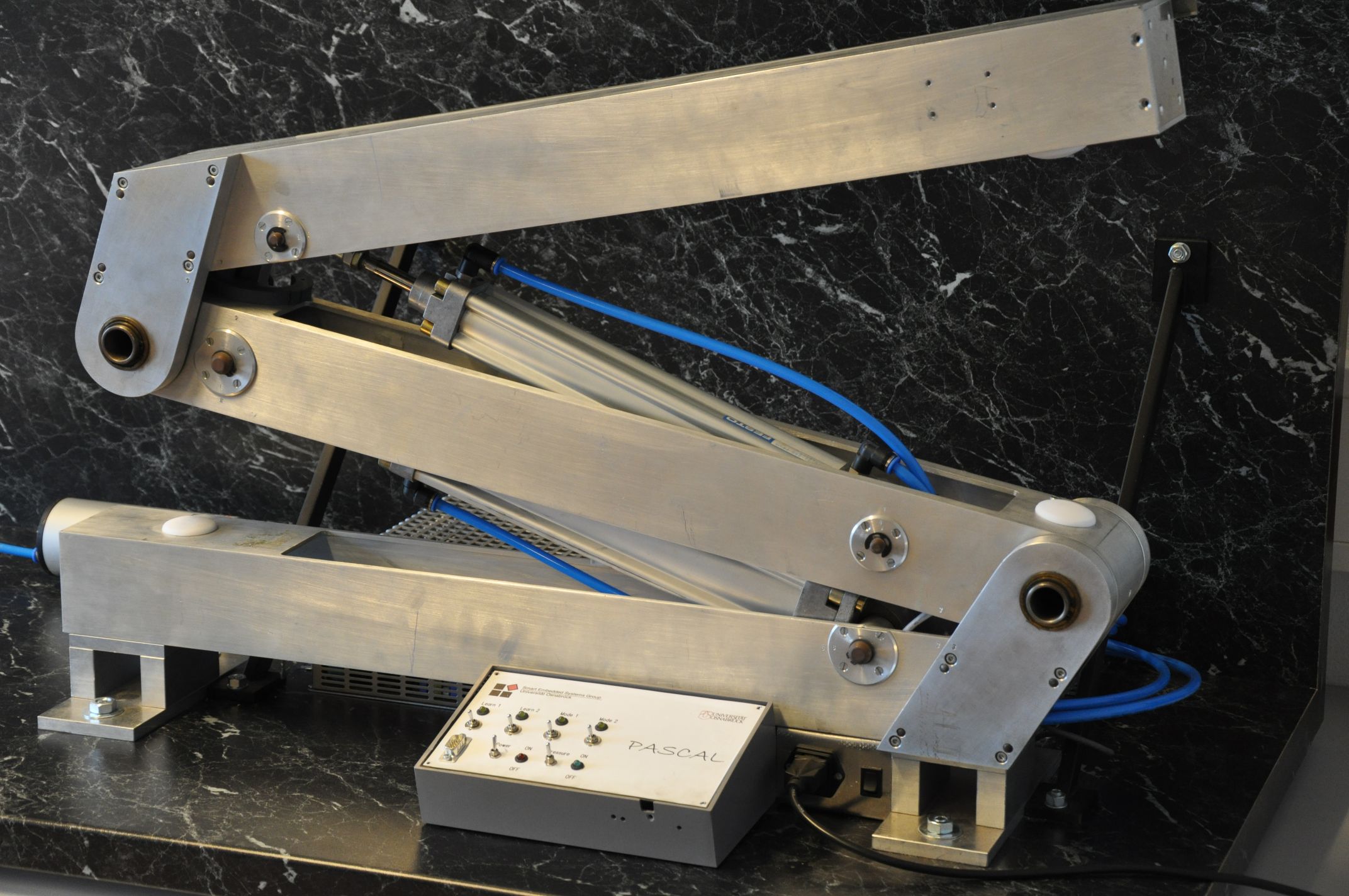
The 2 DoF SCARA-robot arm PASCAL (Pneumatically Actuated SCARA Controlled by Adaptive Learning) is driven by two standard industrial pneumatic cylinders (of 63 and 32 mm diameter) with piston rod. They are actuated via proportional valves by 6 bar air supply. This robot arm can be operated either horizontally or vertically (shown in the figure), thus allowing for different control tasks and for scaling of the control problems from a single axis without gravity to two strongly interacting axes with the same set-up. |
|
The compressibility of air along with strong friction (stick-slip-effect) and the time-variant behavior of pneumatics lead to severe challenges for controller design. These are emphasized by the kinematic as well as kinetic and pneumatic couplings of both degrees of freedom. PASCAL is hence a challenging, but easy to operate testbed for smart and self-optimizing controllers (SHARCS).
PASCAL following a circle
| platform: | 2 DoF aluminum frame (8 × 8 cm) with 120° turning angle at each axis |
| size: | upper arm length 70 cm forearm length 70 cm |
| sensors: | 2 incremental encoders 5 pressure sensors |
| actuators: | pneumatic cylinders with 63 mm diameter and 25 cm displacement by Festo (upper arm) 32 mm diameter and 25 cm displacement by Festo (forearm) two proportional valves (Festo MPYE-5-1/8-HF-010-B) 6 bar air supply |
| hardware: | onsite FPGA + external PC (via USB) |
|
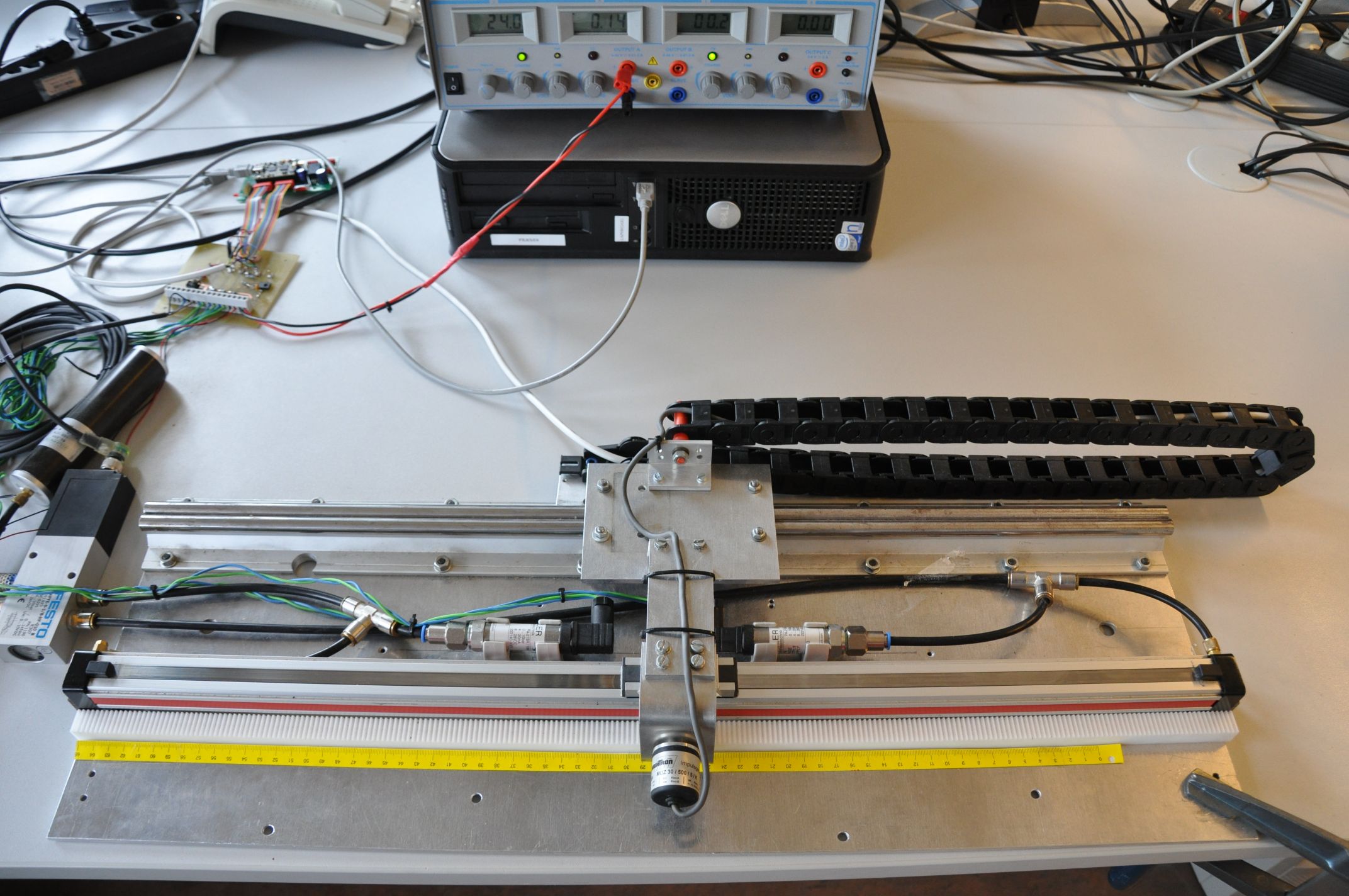
This pneumatic drive system features a standard industrial rodless cylinder (16 mm diameter) and can be loaded with different load masses. The aim is to have a simple and easy to operate, but practically relevant drive system with challenging control problems. It is used as an intuitive example to investigate different control principles and learning architectures. It is a simplified version of the PASCAL robot arm at the same time. Both set-ups thus allow investigations on how and how far control principles can be generalized and deriving more general engineering principles. |
|
| platform: | base plate of 74 × 26 cm with a cart of 13.5 × 10 cm |
| sensors: | 1 incremental encoder 3 pressure sensors |
| actuators: | rodless cylinder (Hörbiger Origo) with 16 mm diameter and 62 cm displacement 1 proportional valve (Festo MPYE-5-1/8-HF-010-B) 6 bar air supply |
| hardware: | onsite FPGA + external PC (via USB) |
|
On the one hand, this pendulum cart is just another real implementation of an inverted pendulum at a first glance and acts a well known control benchmark. Though it is a very simple construction, it allows swinging-up the pendulum and is thus a suitable platform to investigate modular control principles at a more general level. But due to its simple construction, several practically relevant effects arise like e.g. slippage and backlash or limited control energy. This pendulum cart thus forms a real control challenge on the other hand. |

|
It can be operated in two modes: either as a low cost embedded system with an 8-bit microcontroller (Motorola 68HC11) or connected to an external PC. The later mode is used for investigations on control architectures as well as learning and self-optimizing controllers (SHARCS).
Pendulum cart learning to swing up and balance the inverted pendulum
| platform: | aluminum chassis |
| size: | chassis: 29.5 × 13 × 25 cm pendulum length: 16.7 cm |
| weight: | 1.6 kg for chassis 80 g for pendulum |
| sensors: | 2 incremental encoders |
| actuators: | 12 V DC-motor (560 class) |
| hardware: | onboard microcontroller Motorola 68CH11 or onsite FPGA + external PC (via USB) |
|
This is standard set-up offered by Quanser. Because it has less severe control problems than the pendulum cart, this inverted pendulum acts as a starting point for controller design. Transfering the principles to the pendulum cart allows drawing more general conclusions. |

|
| platform: | inverted pendulum by Quansar mounted on a wooden base plate of 120 * 40 cm |
| size: | displacement: 90 cm pendulum length: 31.5 cm |
| sensors: | 2 incremental encoders |
| actuators: | electric gear drive |
| hardware: | onsite FPGA + external PC (via USB) |
|
A simple optical sensor consisting of 16 photodiodes is used as a source of real, i.e. noisy and uncertain input signals which are taken from ordinary game cards. These cards are mounted on a rotating table which rotates with variable speed. This set-up is used as a test platform for learning pattern recognition. In best case we were able to recognize each card by presenting it only one or two times for training of up to 2 m/s without synchronization. |
 
|
| platform: | 16 cards mounted at rotating table with peripheral speed up to 2 m/s |
| size: | picture of cards: 5.3 × 4.9 cm diameter of rotating table 35 cm |
| sensors: | 16 photodiodes |
| actuators: | electric gear drive |
| hardware: | 16 channel AD-converter (16 bit) plus onsite FPGA + external PC (via USB) |
|
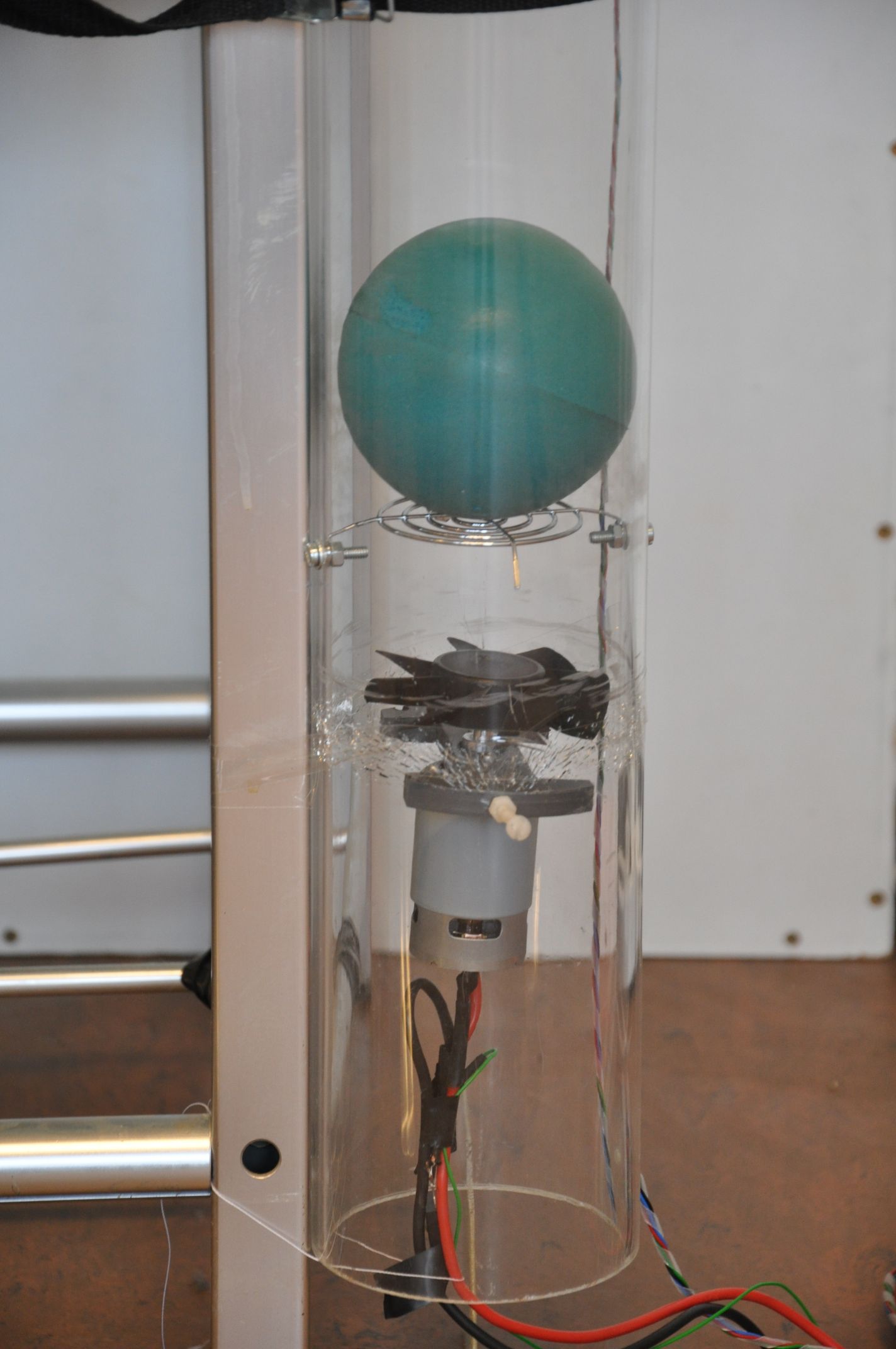
The TULPEN platform (TUbe Learning Process Environment) is a real set-up with strong nonlinearities. Like our other demonstrators it is used for investigating learning control principles. Its different character enables studies on the general applicability of our methods. |
|
| platform: | plexiglass tube with inner diameter of 9.2 cm |
| size: | length 185 cm |
| sensors: | 1 ultrasonic distance sensor or digital camera |
| actuators: | directly driven propeller of 7 cm diameter |
| hardware: | onsite FPGA + external PC (via USB) |